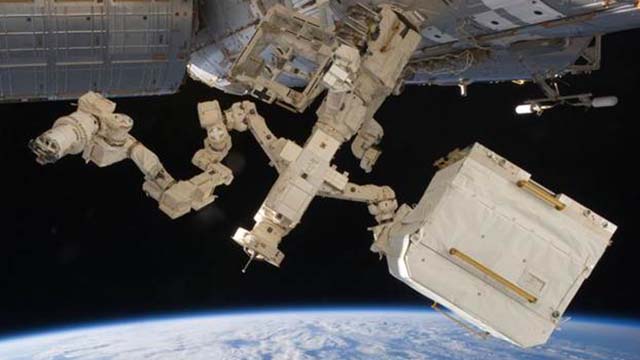
Robots are increasingly finding their way onto flight manifests as future space missions become more ambitious and extend beyond low earth orbit. While the main focus has thus far been on satellite servicing due to its commercial potential, robots are also being considered for orbital debris removal, space construction/assembly, and asteroid sample retrieval. The robotic technologies and automation required to carry out these missions represent a significant advancement beyond the manipulation technology used previously on the Space Shuttle, the International Space Station, and other missions. While higher demands are being driven by the more ambitious nature of the tasks, many tasks involve handling “uncooperative” targets such as satellites and asteroids, which are not equipped with soft capture mechanisms and visual markers for rendezvous and docking. In addition to new enabling hardware, shared autonomy algorithms and operator interfaces that increase telepresence will be essential for carrying out operations in an efficient and effective manner. The full-day workshop will bring together international researchers in the fields of space and servicing robotics to exchange ideas in key enabling technology areas: manipulation, contact dynamics, pose estimation, teleoperation and haptics, shared autonomy, compliant control, multi-manipulator systems, time-delay compensation, and interactions in a space environment.
The purpose of this full-day workshop is to bring together the top researchers in space robotics and satellite servicing to share work/ideas in an effort to field such a system in the near future, both as a national project or an international collaboration. A desired outcome is to gain consensus on the current state-of-the-art in servicing manipulation, and to identify gaps in existing research in order to mature the technology. The long-term goal is create a path forward for satellite servicing utilizing lessons learned from remotely operated vehicles currently deployed in land, sea, and air applications.
The primary audience is constituted by robotics researchers, from both academy and industry, mainly working in the fields of space robotics, manipulator performance, modeling, arm dynamics and control, and migrating from telerobotics to autonomy. Industry members possibly interested in the exploitation of research results represent the secondary audience, together with any other robotic researcher interested in applications in mobile manipulation, pose estimation, rendezvous and docking sensors, dynamic manipulation, and universal end effectors.

Space Systems Laboratory
Univ. of Maryland
College Park, MD, USA

WVRTC
West Virginia Univ.
WV, USA

ESA
Noordwijk,
The Netherlands

NASA/GSFC
Code 408 SSCO
Greenbelt, MD, USA